https://wokwi.com/projects/347478624767574611
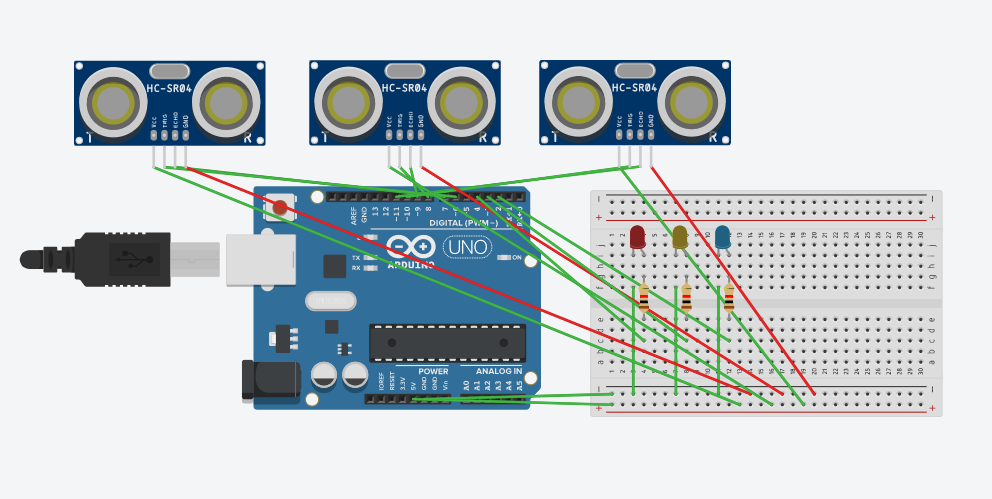
We do this with WOKWI.
const byte numSensors = 3; //const means constant variables, byte means small space in memory, numSensors is the variable name.
const byte ECHO_PIN[numSensors] = {2, 5, 8}; //we create an array to be used in a for loop
const byte TRIG_PIN[numSensors] = {3, 4, 7};
void setup() {
Serial.begin(115200);
pinMode(LED_BUILTIN, OUTPUT);
for (byte s=0; s< numSensors; s++) { /* due to for loop, we reduce pinMode instructions from 6 to only 2:
pinMode(3, OUTPUT);
pinMode(2, INPUT);
pinMode(4, OUTPUT);
pinMode(5, INPUT);
pinMode(7, OUTPUT);
pinMode(8, INPUT); */
pinMode(TRIG_PIN[s], OUTPUT);
pinMode(ECHO_PIN[s], INPUT);
}
}
float readDistanceCM(byte s) {
/* This is a function with a parameter (s) and return a value that depends on the duration of a pulseIn function and a mathematical
calculus with the velocity of sound*/
digitalWrite(TRIG_PIN[s], LOW);
/*We need to have the trigger pin controlled to a low value in order to measure the duration of the high value that is
proportional to the distance of the sensor*/
delayMicroseconds(2);
digitalWrite(TRIG_PIN[s], HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN[s], LOW);
int duration = pulseIn(ECHO_PIN[s], HIGH);
return duration * 0.034 / 2; //divided by 2 because the ultrasound goes and returns back
}
void loop() {
bool isNearby = false;
Serial.print("Measured distance: ");
for (byte s=0; s< numSensors; s++) {
float distance = readDistanceCM(s);
isNearby |= distance < 100;
Serial.print(distance);
Serial.print(" ");
}
Serial.println();
digitalWrite(LED_BUILTIN, isNearby);
delay(100);
}
We do this with TINKERCAD .
int ledPin1 = 2;
int ledPin2 = 3;
int ledPin3 = 4;
int trigPin1 = 6; // és el emisor
int echoPin1 = 7; // és el receptor
int trigPin2 = 8;
int echoPin2 = 9;
int trigPin3 = 10;
int echoPin3 = 11;
void setup() {
Serial.begin (9600);
pinMode(trigPin1, OUTPUT);
pinMode(echoPin1, INPUT);
pinMode(trigPin2, OUTPUT);
pinMode(echoPin2, INPUT);
pinMode(trigPin3, OUTPUT);
pinMode(echoPin3, INPUT);
pinMode(ledPin1, OUTPUT);
pinMode(ledPin2, OUTPUT);
pinMode(ledPin3, OUTPUT);
digitalWrite(ledPin3, HIGH);
}
void firstsensor(){ // This function is for first sensor.
int duration1, distance1;
digitalWrite (trigPin1, HIGH);
delayMicroseconds (10);
digitalWrite (trigPin1, LOW);
duration1 = pulseIn (echoPin1, HIGH);
distance1 = (duration1/2) / 29.1;
Serial.print("1st Sensor: ");
Serial.print(distance1);
Serial.print("cm ");
if (distance1 < 50) { // Change the number for long or short distances.
digitalWrite (ledPin1, HIGH);
} else {
digitalWrite (ledPin1, LOW);
}
}
void secondsensor(){ // This function is for second sensor.
int duration2, distance2; // I create two local variables to have an space in my microcontroller memory
digitalWrite (trigPin2, HIGH); // Emmits an ultrasound for 10 microseconds
delayMicroseconds (10);
digitalWrite (trigPin2, LOW); // Stops the emition of ultrasound
duration2 = pulseIn (echoPin2, HIGH); // Activates echo pin in HIGH to recive the ultrasound backwards
// durations2 keeps the value obtained by echopin2
distance2 = (duration2/2) / 29.1; // Converts value of ultrasound duation (like a time of flight) into a distance with using a mathematical formula
Serial.print("2nd Sensor: ");
Serial.print(distance2);
Serial.print("cm ");
if (distance2 < 50) { // Change the number for long or short distances.
digitalWrite (ledPin2, HIGH);
}
else {
digitalWrite (ledPin2, LOW);
}
}
void thirdsensor(){ // This function is for third sensor.
int duration3, distance3;
digitalWrite (trigPin3, HIGH);
delayMicroseconds (10);
digitalWrite (trigPin3, LOW);
duration3 = pulseIn (echoPin3, HIGH);
distance3 = (duration3/2) / 29.1;
Serial.print("3rd Sensor: ");
Serial.print(distance3);
Serial.print("cm ");
if (distance3 < 50) { // Change the number for long or short distances.
digitalWrite (ledPin3, HIGH);
}
else {
digitalWrite (ledPin3, LOW);
}
}
void loop() {
Serial.println("\n");
firstsensor();
secondsensor();
thirdsensor();
delay(100);
}
solution with LiquidCrystal Library
Here
#include
#include
#include "LiquidCrystal.h"
LiquidCrystal lcd(A0, A1, A2, A3, A4, A5);
const int trigPin1 = 9;
const int echoPin1 = 10;
const int trigPin2 = 5;
const int echoPin2 = 6;
const int trigPin3 = 7;
const int echoPin3 = 8;
long duration1;
long duration2;
long duration3;
int distanceCm1, distanceInch1;
int distanceCm2, distanceInch2;
int distanceCm3, distanceInch3;
void setup() {
Serial.begin(9600);
lcd.begin(16,2);
pinMode(trigPin1, OUTPUT);
pinMode(echoPin1, INPUT);
pinMode(trigPin2, OUTPUT);
pinMode(echoPin2, INPUT);
pinMode(trigPin3, OUTPUT);
pinMode(echoPin3, INPUT);
pinMode(12,OUTPUT);
pinMode(11,OUTPUT);
pinMode(3,OUTPUT);
}
void loop()
{
digitalWrite(trigPin1, LOW);
delayMicroseconds(2);
digitalWrite(trigPin1, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin1, LOW);
duration1 = pulseIn(echoPin1, HIGH);
digitalWrite(trigPin2, LOW);
delayMicroseconds(2);
digitalWrite(trigPin2, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin2, LOW);
duration2 = pulseIn(echoPin2, HIGH);
digitalWrite(trigPin3, LOW);
delayMicroseconds(2);
digitalWrite(trigPin3, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin3, LOW);
duration3 = pulseIn(echoPin3, HIGH);
distanceCm1= duration1*0.034/2;
distanceInch1 = duration1*0.0133/2;
distanceCm2= duration2*0.034/2;
distanceInch2 = duration2*0.0133/2;
distanceCm3= duration3*0.034/2;
distanceInch3 = duration3*0.0133/2;
Serial.print("Distance1: ");
Serial.println(distanceCm1);
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Ultrasonic1 ");
lcd.setCursor(12,0);
lcd.print(distanceCm1);
//delay(500);
Serial.print("Distance2: ");
Serial.println(distanceCm2);
lcd.setCursor(0,1);
lcd.print("U2 ");
lcd.setCursor(3,1);
lcd.print(distanceCm2);
Serial.print("Distance3: ");
Serial.println(distanceCm3);
lcd.setCursor(9,1);
lcd.print("U3 ");
lcd.setCursor(12,1);
lcd.print(distanceCm3);
if(distanceCm1 < 150)
{
digitalWrite(3,HIGH); // LED ON
}
if(distanceCm1 >150)
{
digitalWrite(3,LOW); // LED OFF
}
if(distanceCm2 < 150)
{
digitalWrite(12,HIGH); // LED ON
}
if(distanceCm2 > 150)
{
digitalWrite(12,LOW); // LED OFF
}
if(distanceCm3 < 150)
{
digitalWrite(11,HIGH); // LED ON
}
if(distanceCm3 > 150)
{
digitalWrite(11,LOW); // LED OFF
}
delay(1000);
}